
The advent of the microcontroller changed just about everything. Modern gadgets often have a screen-based interface that may hide dozens or hundreds of functions that would have been impractical and confusing to do with separate buttons and controls. It also colors our thinking of what is possible. Imagine if cars didn’t have cruise control and someone asked you if it were possible. Of course. Monitor the speed and control the gas using a PID algorithm. Piece of cake, right? Except cruise control has been around since at least 1948. So how did pre-microcontroller cruise control work? Sure, in your modern car it might work just like you think. But how have we had seventy-plus years of driving automation?
A Little History

Controlling the speed of an engine is actually not a very new idea. In the early 1900s, flyball governors originally designed for steam engines could maintain a set speed. The idea was that faster rotation caused the balls would spread out, closing the fuel or air valve while slower speeds would let the balls get closer together and send more fuel or air into the engine.
The inventor of the modern cruise control was Ralph Teetor, a prolific inventor who lost his sight as a child. Legend has it that he was a passenger in a car with his lawyer driving and grew annoyed that the car would slow down when the driver was talking and speed up when he was listening. That was invented in 1948 and improved upon over the next few years.

That was the year power door locks came out, too, and as you can tell, the public liked both of these inventions since we still have them today. In fact, the original design by Teetor didn’t actually lock the speed in, but just gave resistance to the gas pedal. Carmakers and consumers demanded the locking feature and Teetor finally consented.
From Flyball to Vacuum
A classic cruise control-equipped car will often have two cables running to the throttle body. One cable goes to your gas pedal and you intuitively know how that works. The other cable does the same thing but instead of a pedal, it is attached to a valve that uses a spring-loaded diaphragm or piston to control the cable — the cruise control servo. A valve draws vacuum or admits air into the chamber causing the diaphragm or piston to move the control cable. Since the cables are attached to each other, when the cruise control engages you can feel it in the gas pedal.
Of course, the actuator doesn’t have to use vacuum. You could as well use an RC servo, but in practice, it is nearly always a diaphragm or piston that has a vacuum on one side. The controller manages the vacuum via a valve that connects to the intake manifold or a dedicated pump along with a valve that bleeds air into the chamber. You can see a typical controller in the video below.
There are variations, of course. Some cars only have a single cable to the throttle body and combine input from the cruise control and gas pedal into that one cable. On newer cars, the throttle is likely operated by an electric motor anyway and a microprocessor determines the throttle position. In an older car, the vacuum setting would be in proportion to the difference between the set speed and the desired speed.
One common scheme was to have a single wheel that controls the cable to the throttle body. Above and below the wheel are two other wheels. The top wheel connects to the gas pedal and the bottom wheel connects to a motor. The bottom wheel is operated by the controller. In systems like this, a solenoid will lock the position of the wheel, and error signals from the controller will adjust the wheel position slightly to minimize the error using proportional control. For example, a pulse train from a magnetic sensor might be smoothed to a DC voltage and subtracted from a setpoint voltage to generate the error signal.
Integrated Circuitry
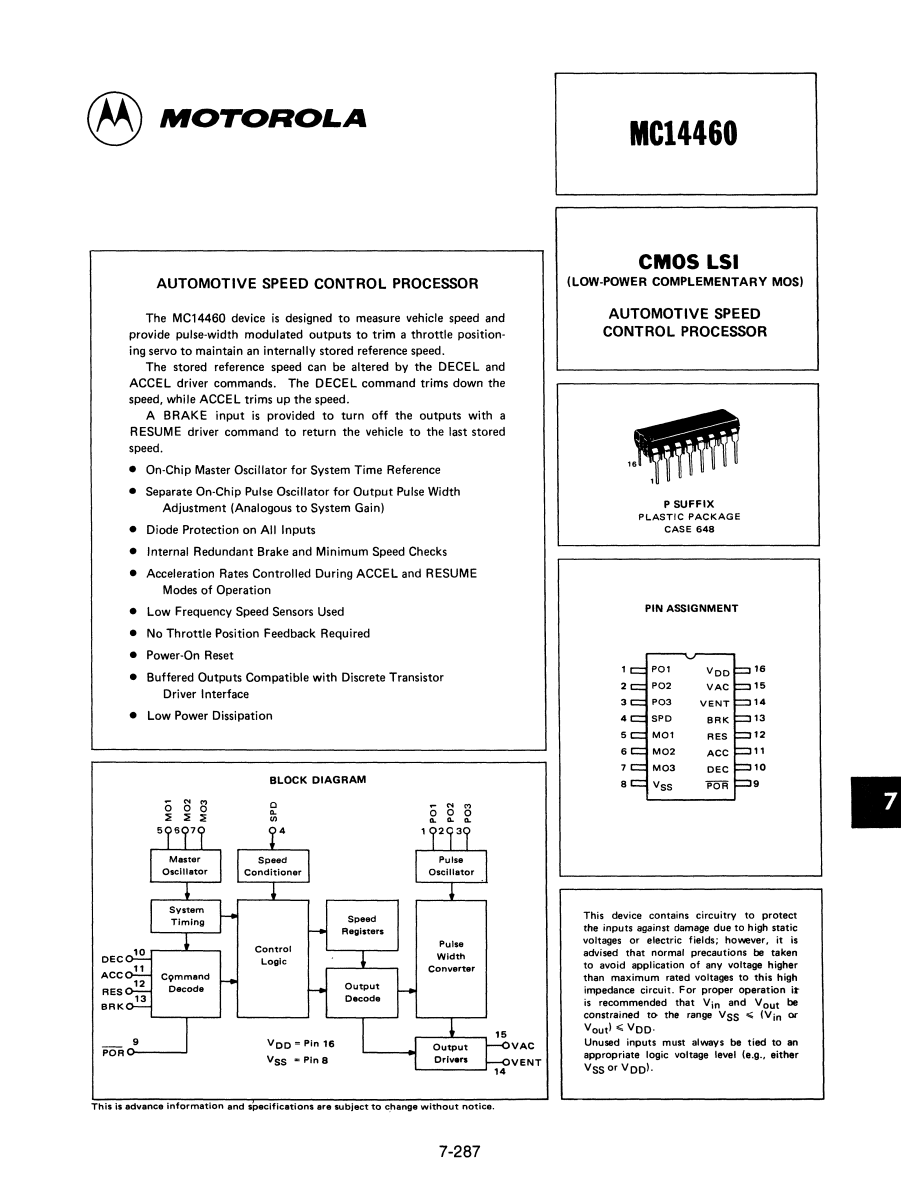 The Motorola MC14460 was an “automotive speed control processor” that was common in pre-microprocessor cars. We don’t know for sure what was on the inside, but given the chip-making capabilities of the day and the classification of the chip, we doubt it was a microcontroller internally.
The Motorola MC14460 was an “automotive speed control processor” that was common in pre-microprocessor cars. We don’t know for sure what was on the inside, but given the chip-making capabilities of the day and the classification of the chip, we doubt it was a microcontroller internally.
The chip was marvelously economical on external circuits. It would drive two coils that control the throttle body. You can tell the output is made to drive a vacuum actuator as the outputs have names of VAC and VENT; one to open the vacuum valve and the other to admit air. The device also accepted a pulse stream input where 8000 pulses equated to one mile of travel. Another input detected the brake light signal.
Beyond that, there were three switches every modern driver knows: one to speed up, one to slow down, and one to resume speed. This IC made cruise control cheap to include on modern cars even though the computerization of cars eventually pushed it out of favor.
Today and Beyond
Very modern cars do more than just maintaining speed. Using radar above 70 GHz allows your car to see cars and obstacles ahead of you. The car can then adjust the speed to keep a safe following distance or even brake before you have a collision. In addition, some systems will notify you when the car ahead of you drives away, a nice feature if you have the bad habit of getting absorbed in your phone at stoplights.
We assume cars will eventually integrate with your phone. You’ll plug it in and set your speed from there. Or maybe it will all be brainwave-activated. Who knows?
Want to build your own cruise control? Peter and Jakub did and you can read about it in their scholarly paper. We feel bad we don’t use vacuum physics in our projects. Gas pumps also depend on suction.















Microcontroler didn’t not change anything. My Lifan 168f has 100% mechanic speed control. I think even comunist could make speed control because my friend has PAB-2 agregat and it always run 50 Hz voltage.
PS. Sorry my english -.- I’m from Poland
i was thinking there’s no reason it couldn’t use a mechanical PID, but actually, it doesn’t need to for old-fashioned cruise control. you accelerate up to speed, and then you set the cruise control to maintain the speed once you’re there. that doesn’t require PID to get a satisfactory result, a simple infinite-feedback more/less sort of control (op amp) is roughly sufficient, with just some filtering so the oscillations aren’t unstable. PID’s magic is that it can accelerate from 0 without (significantly) overshooting the target. a very different (and difficult) problem, as it requires letting off the gas a little as you get closer.
PID also helps when the terrain is uneven or other external influences like wind play a role. Simpler control schemes have a tendency to wander under those conditions, which means there’s a risk of speeding.
Or perhaps no (individual) cars anymore.
It’s incredible how strong a cultural embedding can hack our senses. We imagine having had “cars” as we know them today since the Stone Age [1] and having them far in the future (perhaps with added wings).
As much as someone from the 18th century would imagine us still riding other mammals to get from here to there.
But perhaps, just perhaps, the future is different :)
[1] http://content.time.com/time/specials/packages/article/0,28804,1843821_1843820_1843808,00.html
Huh? People have been driving around in wheeled vehicles for thousands of years. The only thing thats changed since ancient Rome is the power source.
Mostly people of the past did not move around on wheels. The wheels were for *stuff*, stuff that couldn’t walk on its own or later balance on a horse. Even riding on a horse is a time dependant activity as it took centuries to selectively breed them to be anywhere near large enough to ride.
comma.ai is an open source adaptive cruise control that runs off a single camera on the phone. I use it in my prius. It’s amazing.
Wish I could use this in my ford. They seem to proactively lock out automated steering inputs after 10secs to prevent this. Everything else is in there from a hardware standpoint. No one appears to have got round it.
there are videos of people driving fords by hacking the parking assist system. Comma refuses to accept that code, but it does seem to work.
Brings back memories. Back in the early 80s, Dad installed an aftermarket cruise control from JC Whitney. Pretty sure it used this chip. Had the set, resume, and accel buttons.
A lot of old cars used levers to control throttle and could also be used as “cruise control”.
except no. that’s just an unsprung throttle. if you suddenly start up an incline, you’re going to slow down as the extra load gets re-matched to a new speed at the static throttle setting. cruise control is to maintain speed against varying engine loads
They use to sell that adjustable rod that was supposed to be used to keep a high idle. You’d place it between dash and gas pedal and adjust the idle speed You wanted. Of course people used it as a cruise control, mostly in big rigs!
The cruise control in most newer semis can be used to adjust the idle speed. I use to keep my Mack at the lowest idle speed, the mirrors vibrated so bad they were unusable at idle! Made crawling through sand and mud easier though, had much more control over engine speed to prevent wheel spin and hop at low speed. Could just throw it in low low and let it idle out with the computer giving it just enough fuel to keep it going. If you hit the throttle too hard it would wheel hop and then start spinning, once spinning you’re stuck!
Back in the 80´s I saw a Fiat 600 with that exact rod thingamajig. It did work in a sense, on a perfectly level windstill road it kept the set speed, until someone passed or one caught up with another vehicle. Not recommended for use in slippery conditions.
This makes me wonder why the foot pedal doesn’t control the speed. I.e why not have the foot pedal as an input into a speed regulator so that you can maintain the same speed by just not moving your foot?
As it is now, our brain is the speed regulator. We monitor the needle and adjust our foot control of the throttle continuously to correct the speed. Why not have that loop taken care of automatically, so that our foot just sets the input parameter?
“The idea was that faster rotation caused the balls would spread out, closing the fuel or air valve while slower speeds would let the balls get closer together and send more fuel or air into the engine.“
Yeah I get the governor. My query was irrespective of implementation. If the car is smart enough to have some kind of speed control, then why isn’t that speed control hooked up to the accelerator foot pedal so that instead of the accelerator pedal being a component in an open loop system (with your brain as part of the loop), the accelerator would then be an input into a closed loop system.
Because normal driving requires differing amounts of acceleration.
Pulling out into the far lane of a 35mph street with heavy cross traffic? Better accelerate briskly to avoid getting hit!
Pulling out onto an empty 35mph street with a 3-tier wedding cake in your passenger’s lap? Slow and smooth acceleration is required.
Having the go pedal be a “power” control lets the driver control both acceleration and speed by changing their foot position. If the pedal position determined target speed only, then acceleration control would be lost.
Yes – this exactly.
Subaru, for example, uses a closed loop around engine torque. E-throttle percentage demands a torque level from the engine, from 0% to 100%. This translates pretty much 1:1 with how directly controlling the throttle blade works on older vehicles, but with all the advantages of being able to remap the throttle curve (eco/sport mode) and then further close the loop around another target, like speed (cruise control).
(I have a 2012 STi, and the Eco mode is really helpful – not for actually conserving fuel, but it gives me way more precise control at low throttle when I’m trying to fart around a parking lot at nearly-idle speed.)
Your foot doesn’t really have enough precision to smush a pedal to “60 km/h” in a slow enough manner for a smooth acceleration while also allowing for fast acceleration, you’d have to use a hand lever or something.
By controlling acceleration with your foot, speed is the integral of your foot position. Integration is a smoothing function. In addition to the disadvantage of being more complicated, if your foot controlled speed there would be no filtering and acceleration would be the differential of your foot position. Differentiation accentuates fast changes; so there would be exaggerated changes in acceleration, felt as force by driver and passengers. In short, the ride would be less comfortable.
This is more or less what cruise-control is… I used like this in my older car whenever i was in highest gear, just using the buttons to drive.
If you don’t know, what you describe is how most tractors work, like the throttle on a lawnmower.
My pop has an old fordson major from 60, with no foot throttle, only a wiper on the dashboard controlling the revs. Not exactly safe, but pops is still around and never did somersault the tractor.
> In addition, some systems will notify you when the car ahead of you drives away, a nice feature if you have the bad habit of getting absorbed in your phone at stoplights.
A habit that will see you fined here in Queensland.
“”In addition, some systems will notify you when the car ahead of you drives away, a nice feature if you have the bad habit of getting absorbed in your phone at stoplights.””
Which is the crux of the problem with modern driving aids.
Old style cruise control was about helping people that were poor drivers to keep to a constant speed. Yet it’s now in pretty much 99% of new cars I still find people on the motorway that speed up slow down and cause problems and traffic issues.
But modern cruise control withe adaptive control, auto braking, auto distance auto acceleration is a step too far.
it’s not about providing better drivers it’s now about enabling incredibly bad drivers.
The comment jests about people using their phones but this is EXACTLY what this tech is allowing people to do.
Illegally use their phones whilst supposed to be driving and letting the car do it for them.
So now you have a technology race, where all cars need adaptive cruise so they can react faster than a human can to the car in front pulling a stupid maneuver that a human wouldn’t be doing. When you drive along reading the traffic, vehicles and the driver behavior, much like reading people outside of the their vehicles, you can be a more defensive driver and keep out of potential accidents – you an read them before they happen. If those cars are doing some of the driving themselves, that’s a hidden factor you’ve got to consider.
It then makes driving without those same aids dangerous for yourself, even if you are a good driver and not using them to break the law.
As someone that drives a lot for business and pleasure, this technology creep and halfway house of automation has made driving less enjoyable and more dangerous. People’s driving is and does get steadily worse with more safety and more gadgets. Touchscreens, in car entertainment, idiots driving with headphones in !? it’s all making the roads a worse place to be.
i have to agree the saftey features are likely to become a danger when we relay on them. The first time I drove a car with lane holding with out even thinking i happily let go of the wheel and picked something up of the floor and just expected the car to do its thing – when I realised what I did it scared the shit out of me.
I have a Saab 9-3 from -98 with a cruise control that only deactivates from braking, pushing the clutch or the cruise control deactivation slider. I damn near killed myself one unforgettable winter when aquaplaning on the 3 inch snow slush covering the road while cruising at 60mph and having the cruise control pedalling the throttle to maintain 60 mph. Scared me shitless. After that indicent, I never trust any enchancements in any car, unfair as that might be.
Cruise Control –
https://www.youtube.com/watch?v=4f6TLb98KRc
So, this means that the cruise control on my EV (Renault Zoe) is literally software, because the EESM motor speed is governed by the rate the magnetic flux rotates and the power applied to the coils, so the accelerator pedal has no direct control over the speed (just an ADC I presume). Similarly; the cruise control samples the current speed when set and just needs to measure the current speed and apply a PID algorithm to adjust the power applied to the motor so that the magnetic coils can maintain the same magnetic flux rotation rate.
Hence, why the mechanical simplicity of EVs has an inherent competitive advantage. Similarly, when the axel itself is going faster than the driver wants (even in cruise control), the motor operates in reverse, generating an electric current in the coils which is then used to recharge the traction battery as well as slowing the car down.
https://easyelectriclife.groupe.renault.com/en/outlook/technology/the-renault-zoe-motor-energy-efficiency-and-power/
Lots of big manufacturers are struggling with the software which turns out to be harder to do well than it seems. The mechanical advantage is offset by the software complexity, at least for now.
We unfortunately also see all kinds of privacy and anti consumer concerns arising as the networked nature of the cars means manufacturer can do and are doing all kinds of nasty things.